UMA base ortonormal É formado por vetores perpendiculares entre si e cujo módulo também é 1 (vetores unitários). Vamos lembrar que uma base B em um espaço vetorial V, é definido como um conjunto de vetores linearmente independentes capazes de gerar o referido espaço.
Por sua vez, um espaço vetorial é uma entidade matemática abstrata entre cujos elementos são vetores, geralmente associados a grandezas físicas como velocidade, força e deslocamento ou também a matrizes, polinômios e funções..

Os vetores têm três elementos distintos: magnitude ou módulo, direção e sentido. Uma base ortonormal é especialmente útil para representá-los e operar com eles, uma vez que qualquer vetor que pertença a um determinado espaço vetorial V, pode ser escrito como uma combinação linear dos vetores que formam a base ortonormal.
Desta forma, as operações entre vetores são executadas analiticamente, como adição, subtração e os diferentes tipos de produtos definidos no referido espaço..
Entre as bases mais utilizadas em física está a base formada por vetores unitários eu, j Y k Eles representam as três direções distintas do espaço tridimensional: altura, largura e profundidade. Esses vetores também são conhecidos como vetores de unidades canônicas.
Se, em vez disso, os vetores são trabalhados em um plano, dois desses três componentes seriam suficientes, enquanto para vetores unidimensionais apenas um é necessário.
Índice do artigo
1- A base B é o menor conjunto possível de vetores que geram o espaço vetorial V.
2- Os elementos de B eles são linearmente independentes.
3- Qualquer base B de um espaço vetorial V, permite expressar todos os vetores de V como uma combinação linear dele e esta forma é única para cada vetor. Portanto, para B também é conhecido como sistema gerador.
4- O mesmo espaço vetorial V pode ter bases diferentes.
Aqui estão vários exemplos de bases ortonormais e bases em geral:
Também chamada de base natural ou base padrão de ℜ n, onde ℜ n é o espaço n-dimensional, por exemplo, o espaço tridimensional é ℜ 3. Para o valor de n É chamado dimensão do espaço vetorial e é denotado como dim (V).
Todos os vetores pertencentes a ℜ n são representados por n-adas ordenou. Para espaço ℜn, a base canônica é:
e1 = <1,0,… ,0>; edois = <0,1,… ,0>; ... en = <0,0,… ,1>
Neste exemplo, usamos a notação com colchetes ou “colchetes” e negrito para os vetores unitários e1, edois, e3...
Os vetores familiares eu, j Y k admitir esta mesma representação e todos os três são suficientes para representar os vetores em ℜ 3:
eu = <1,0,0 >; j = <0,1,0 >; k = <0,0,1 >
Isso significa que a base pode ser expressa assim:
B = <1,0,0 >; <0,1,0 >; <0,0,1 >
Para verificar que são linearmente independentes, o determinante formado com eles é diferente de zero e também igual a 1:
F = <4,-7,0 > N = 4eu -7j + 0k N.
Portanto eu, j Y k compõem um sistema gerador de ℜ 3.
A base padrão descrita na seção anterior não é a única base ortonormal em ℜ3. Aqui temos, por exemplo, as bases:
B1 =
Bdois = <3/5, 4/5,0 >; <- 4/5, 3/5,0 >; <0,0,1 >
Pode-se mostrar que essas bases são ortonormais, para isso lembramos as condições que devem ser atendidas:
-Os vetores que formam a base devem ser ortogonais entre si.
-Cada um deles deve ser unitário.
Podemos verificar isso sabendo que o determinante formado por eles deve ser diferente de zero e igual a 1.
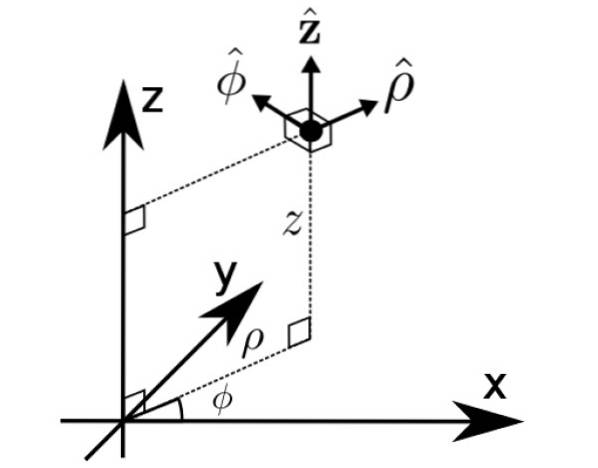
Base B1 é precisamente aquela das coordenadas cilíndricas ρ, φ e z, outra forma de expressar vetores no espaço.
Mostre que a base B = <3/5, 4/5,0 >; <- 4/5, 3/5,0 >; <0,0,1 > é ortonormal.
Para mostrar que os vetores são perpendiculares entre si, usaremos o produto escalar, também chamado de produto interno ou escalar de dois vetores.
Sejam quaisquer dois vetores ou Y v, seu produto escalar é definido por:
ou • v = u.v. cosθ
Para distinguir os vetores de seus módulos usaremos negrito para os primeiros e letras normais para os segundos. θ é o ângulo entre ou Y v, portanto, se eles são perpendiculares, significa que θ = 90º e o produto escalar é zero.
Alternativamente, se os vetores são dados em termos de seus componentes: ou =
ou • v = oux .vx + ouY .vY + ouz .vz
Desta forma, os produtos escalares entre cada par de vetores são, respectivamente:
eu) <3/5, 4/5,0 > • <- 4/5, 3/5,0 > = (3/5). (- 4/5) + (4/5). ((3/5) + 0,0 = (-12/25) + (12/25) = 0
ii) <3/5, 4/5,0 > • <0, 0,1 > = 0
iii) <- 4/5, 3/5,0 > • <0, 0,1 > = 0
Para a segunda condição, o módulo de cada vetor é calculado, o qual é obtido por:
│u │ = √ (uxdois + ouYdois + ouzdois)
Assim, os módulos de cada vetor são:
│<3/5, 4/5,0 >│ = √ [(3/5)dois + (4/5)dois + 0dois)] = √ [(9/25) + (16/25)] = √ (25/25) = 1
│<-4/5, 3/5,0 >│ = √ [(-4/5)dois + (3/5)dois + 0dois)] = √ [(16/25) + (9/25)] = √ (25/25) = 1
│<0, 0,1 >│ = √ [0dois + 0dois + 1dois)] = 1
Portanto, todos os três são vetores unitários. Finalmente, o determinante que eles formam é diferente de zero e igual a 1:

Escreva as coordenadas do vetor C = <2, 3,1 > em termos da velha base.
Para fazer isso, o seguinte teorema é usado:
Seja B = v1, vdois, v3,... vn uma base ortonormal no espaço V com produto interno, o vetor C é representado por B da seguinte forma:
C = <C•v1> v1 + <C•vdois> vdois +<C•v3> v3 +... <C•vn> vn
Isso significa que podemos escrever o vetor na base B, usando os coeficientes <C•v1>, <C•vdois>, ... <C•vn>, para o qual os produtos escalares indicados devem ser calculados:
<2, 3,1 > • <3/5, 4/5,0 > = (2). (3/5) + (3). (4/5) + 1,0 = (6/5) + (12/5) = 18/5
<2, 3,1 > • <- 4/5, 3/5,0 > = (2). (- 4/5) + (3). (3/5) + 1,0 = (-8/5) + (9/5) = 1/5
<2, 3,1 > • <0,0,1> = 1
Com os produtos escalares obtidos, é construída uma matriz, chamada matriz de coordenadas de w.
Portanto, as coordenadas do vetor C na base B são expressos por:
[C]B= [(5/18); (1/5); 1]
A matriz de coordenadas não é o vetor, uma vez que um vetor não é o mesmo que suas coordenadas. Esses são apenas um conjunto de números que servem para expressar o vetor em uma determinada base, não o vetor como tal. Eles também dependem da base selecionada.
Finalmente, seguindo o teorema, o vetor C seria expresso assim:
w = (18/5) v1 + (1/5) vdois + v3
Com: v1 = <3/5, 4/5,0 >; vdois = <- 4/5, 3/5,0 >; v3 = <0,0,1 >, ou seja, os vetores da base B.



Ainda sem comentários