
O regra da mão direita é um recurso mnemônico para estabelecer a direção e o sentido do vetor resultante de um produto vetorial ou produto vetorial. É amplamente utilizado em física, uma vez que existem importantes quantidades vetoriais que são o resultado de um produto vetorial. É o caso do torque, força magnética, momento angular e momento magnético, por exemplo.
Sejam dois vetores genéricos para Y b cujo produto cruzado é para x b. O módulo de tal vetor é:
para x b = a.b. em α
Onde α é o ângulo mínimo entre para Y b, enquanto aeb representam seus módulos. Para distinguir os vetores de seus módulos, letras em negrito são usadas.
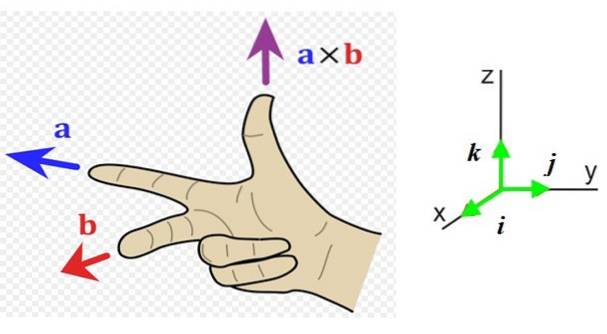
Agora precisamos saber a direção e o sentido desse vetor, por isso é conveniente ter um sistema de referência com as três direções do espaço (figura 1 à direita). Os vetores unitários eu, j Y k eles apontam respectivamente para o leitor (fora da página), para a direita e para cima.
No exemplo da Figura 1 à esquerda, o vetor para dirige para a esquerda (direção Y negativo e dedo indicador da mão direita) e o vetor b vai para o leitor (direção x positivo, dedo médio da mão direita).
O vetor resultante para x b tem a direção do polegar, para cima na direção z positivo.
Índice do artigo
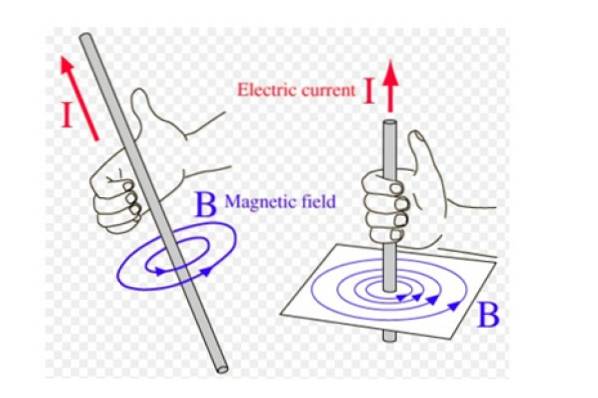
Esta regra, também chamada de regra do polegar direito, É muito utilizado quando existem magnitudes cuja direção e direção estão girando, como o campo magnético B produzido por um fio fino e reto que carrega uma corrente.
Neste caso as linhas do campo magnético são círculos concêntricos com o fio, e a direção de rotação é obtida com esta regra da seguinte forma: o polegar direito aponta na direção da corrente e os quatro dedos restantes são curvados na direção de o campo. Ilustramos o conceito na figura 2.
A figura abaixo mostra uma forma alternativa da regra da mão direita. Os vetores que aparecem na ilustração são:
-A velocidade v de uma carga pontual q.
-Campo magnético B dentro do qual a carga se move.
-FB a força que o campo magnético exerce sobre a carga.
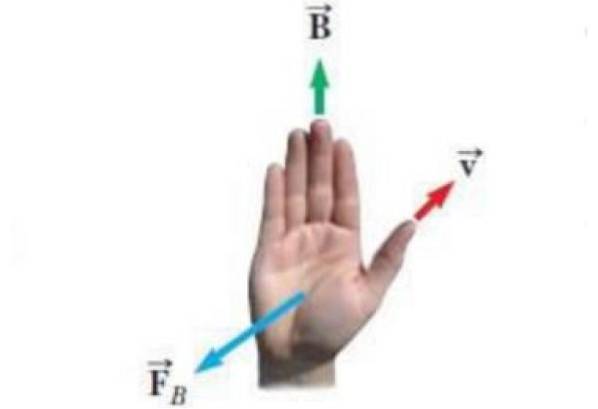
A equação para a força magnética é FB = qv x B e a regra da mão direita para saber a direção e o sentido de FB é aplicado assim: os polegares apontam de acordo com v, os quatro dedos restantes são colocados de acordo com o campo B. Então FB é um vetor que sai da palma da mão, perpendicular a ela, como se estivesse empurrando a carga.
Observe que FB Eu apontaria na direção oposta se a carga q fosse negativa, uma vez que o produto vetorial não é comutativo. De fato:
para x b = - b x para
A regra da mão direita pode ser aplicada a várias quantidades físicas, vamos conhecer algumas delas:
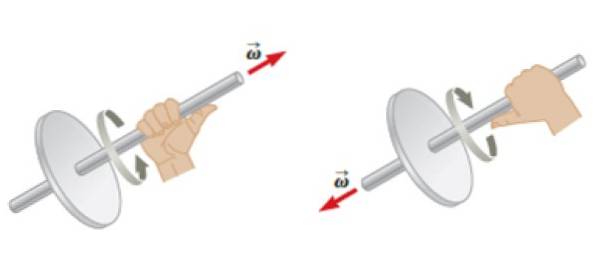
Ambas as velocidades angulares ω como aceleração angular α eles são vetores. Se um objeto está girando em torno de um eixo fixo, é possível atribuir a direção e o sentido desses vetores usando a regra da mão direita: os quatro dedos são curvados seguindo a rotação e o polegar imediatamente oferece a direção e o sentido da velocidade angular ω.
Por sua vez, a aceleração angular α terá o mesmo endereço que ω, mas seu significado depende se ω aumenta ou diminui em magnitude ao longo do tempo. No primeiro caso, ambos têm a mesma direção e sentido, mas no segundo eles terão direções opostas..
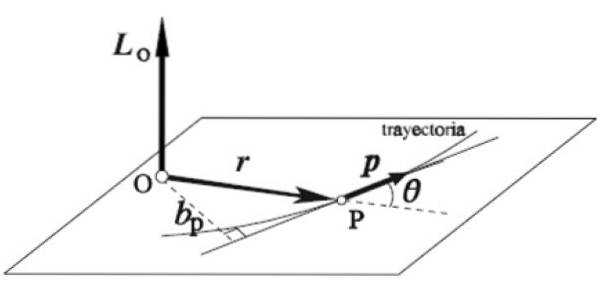
O vetor de momento angular euOU de uma partícula que gira em torno de um determinado eixo O é definido como o produto vetorial de seu vetor de posição instantânea r e o momento linear p:
eu = r x p
A regra da mão direita é aplicada desta forma: o dedo indicador é colocado na mesma direção e sentido de r, o dedo médio no de p, tanto no plano horizontal, como na figura. O polegar é estendido automaticamente verticalmente para cima, indicando a direção e a sensação do momento angular euOU.
O topo na figura 6 está girando rapidamente com velocidade angular ω e seu eixo de simetria gira mais lentamente em torno do eixo vertical z. Este movimento é chamado precessão. Descreva as forças que agem no pião e o efeito que produzem.
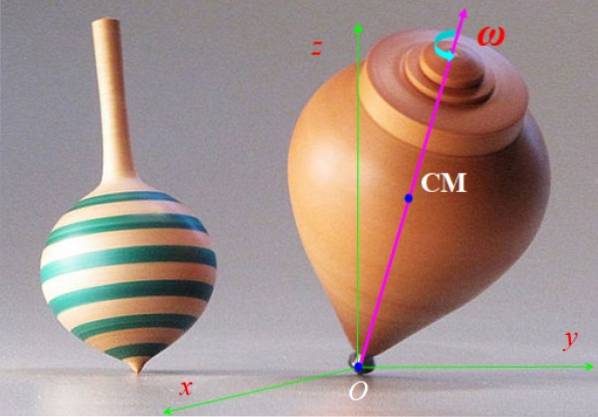
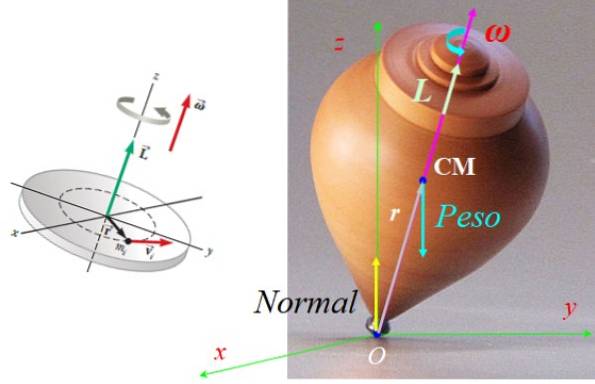
As forças agindo no topo são normais N, aplicado no fulcro com o solo O mais o peso Mg, aplicado no centro de massa CM, com g o vetor de aceleração da gravidade, dirigido verticalmente para baixo (ver figura 7).
Ambas as forças se equilibram, portanto o topo não se move. No entanto, o peso produz um torque ou torque τ rede em relação ao ponto O, dada por:
τOU = rOU x F, com F = Mg.
o que r e Mg eles estão sempre no mesmo plano em que o topo gira, de acordo com a regra da mão direita, o torque τOU está sempre localizado no avião xy, perpendicular a ambos r o que g.
Observe que N não produz um torque em relação a O, porque seu vetor r em relação a O é nulo. Esse torque produz uma mudança no momento angular que faz com que o topo preceda em torno do eixo Z..
Indica a direção e o sentido do vetor de momento angular eu do topo da figura 6.
Qualquer ponto no topo tem massa meu, velocidade veu e vetor de posição reu, quando gira em torno do eixo z. Momento angular eueu da referida partícula é:
eueu = reu x peu = reu x meuveu
Dado que reu Y veu são perpendiculares, a magnitude de eu isso é:
eueu = meureuveu
Velocidade linear v está relacionado com a velocidade angular ω Através dos:
veu = reuω
Portanto:
eueu = meureu (reuω) = meureudoisω
O momento angular total do pião L é a soma do momento angular de cada partícula:
L = (∑meureudois ) ω
∑ meureudois é o momento de inércia I do topo, então:
eu= Euω
Portanto eu Y ω têm a mesma direção e sentido, conforme mostrado na figura 7.



Ainda sem comentários