O soma do vetor é a operação de adição entre vetores que resulta em outro vetor. Os vetores são caracterizados por terem magnitude e também direção e sentido. Portanto, não é possível, em geral, adicioná-los como seria feito com as grandezas escalares, ou seja, somando números..
O vetor obtido da soma de vários vetores é denominado vetor resultante. Em Mecânica, eles falam sobre o força resultante, que é a soma vetorial de todas as forças em um corpo. Esta resultante é equivalente ao conjunto ou sistema de forças.
Para especificar totalmente o vetor de soma é necessário indicar a magnitude e a unidade, a direção e o sentido.
É importante notar que ao adicionar vetores, eles devem ter a mesma magnitude física, portanto a soma do vetor é uma operação homogênea. Isso significa que podemos adicionar uma força a outra, mas não uma força com um deslocamento, uma vez que o resultado não tem sentido.
Vários métodos estão disponíveis para encontrar o vetor resultante: gráfico e analítico. Para encontrar somas de vetores com métodos gráficos, partimos de uma representação simples de um vetor, ou seja, um segmento orientado ou seta como esta:

Os vetores são denotados por letras em negrito no texto impresso, ou por uma seta acima da letra, para distingui-los de suas respectivas magnitudes ou quantidades escalares. Por exemplo, a magnitude do vetor v É simplesmente v.
Índice do artigo
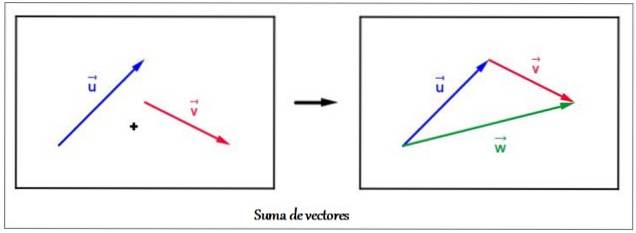
Para adicionar mais de dois vetores coplanares, o método do polígono ou método transversal, que consiste em traduzir-se paralelamente a cada um dos vetores adendos. Uma característica dos vetores é que eles são invariantes em relação à translação, portanto usaremos esta propriedade para estabelecer a soma.
Começamos com qualquer um dos vetores, pois a adição do vetor é comutativa e a ordem dos adendos não altera a soma. O segundo vetor é traduzido em seguida, combinando sua origem com o final do primeiro.
Em seguida, ele é trazido para o próximo vetor e colocado em seguida, seguindo o mesmo procedimento, que é casar a origem com o final do anterior. Proceda desta forma até que o último vetor seja posicionado.
O vetor resultante é aquele que une a origem do primeiro com a extremidade livre do último. O nome deste método vem da figura resultante: um polígono.
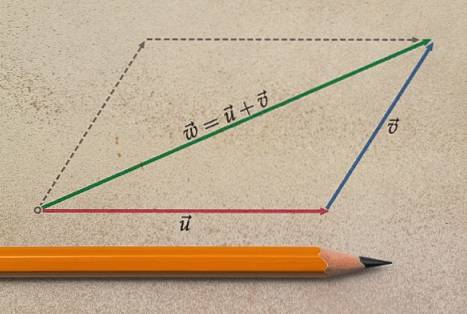
Vamos tomar como exemplo a soma de dois vetores ou Y v mostrado na figura acima.
Começando com o vetor ou, movido para o vetor v para combinar sua origem com o final do primeiro. O vetor resultante C é tirado da origem de ou até o fim de v, formando uma figura de três lados: um triângulo. É por isso que, neste caso especial, o procedimento é chamado método do triângulo.
Observe um detalhe importante, a magnitude ou módulo do vetor resultante não é a soma dos módulos dos vetores adicionados. Na verdade, é quase sempre menor, a menos que os vetores sejam paralelos..
Vamos ver o que acontece neste caso abaixo.
O método descrito também pode ser aplicado ao caso especial em que os vetores são paralelos. Vamos considerar o seguinte exemplo:

É deixado para o vetor v em sua posição original, e é traduzido para o vetor ou de tal forma que sua origem coincide com o fim de v. Agora, um vetor é desenhado a partir da origem de v e termina o fim de ou.
Este é o vetor resultante C e seu tamanho é a soma dos tamanhos dos adendos. A direção e o sentido dos três vetores são os mesmos.
O vetor resultante tem um módulo máximo se os adendos formarem um ângulo de 0º entre si, como no exemplo. Se os vetores formarem um ângulo de 180º entre si, o vetor resultante terá módulo mínimo.
Um ciclista viaja primeiro 3 km em direção ao norte e, em seguida, 4 km a oeste. Seu deslocamento, que chamamos R, é facilmente encontrado com o método do triângulo mais um quadro de referência, onde os pontos cardeais são marcados:
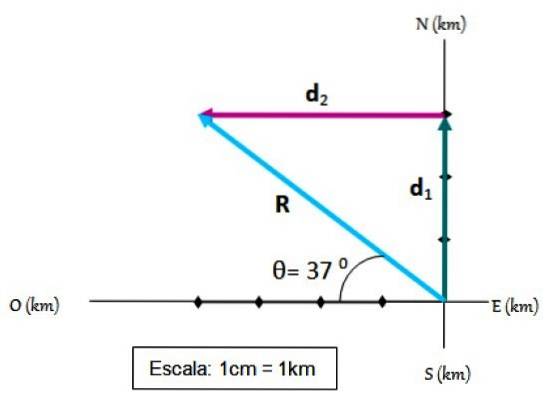
-O ponto de partida é feito para coincidir com a origem do sistema de referência.
-Nos eixos de coordenadas, é escolhida uma escala, que neste caso é 1 cm = 1 km
-O primeiro deslocamento é desenhado em escala d1.
-Então, para d1 o segundo deslocamento é desenhado ddois, também em escala.
-O deslocamento resultante R é um vetor que vai da origem ao final de ddois.
-O tamanho de R é medido com uma régua graduada, é fácil verificar que R = 5.
-Finalmente o ângulo que R forma com a horizontal é medida com a ajuda de um transferidor e resulta ser θ = 37 0
Um nadador quer atravessar um rio e para isso nada a uma velocidade de 6 km / h, perpendicular à costa, mas uma corrente que carrega uma velocidade de 4 km / h o desvia.
Para saber sua velocidade resultante, os vetores de velocidade do nadador, que foi desenhado na vertical, e da corrente, que é mostrada na horizontal, são adicionados.
Seguindo o método gráfico, a velocidade resultante é obtida vR:
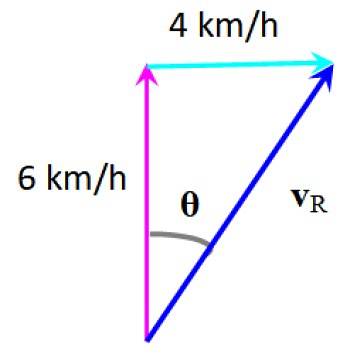
A deflexão experimentada pelo nadador pode ser calculada por:
θ = arctg (4/6) = 33,7º à direita de sua direção inicial
A magnitude de sua velocidade é aumentada graças ao fato de que a velocidade do rio é adicionada vetorialmente. Ele pode ser encontrado definindo cuidadosamente uma escala, como no exemplo acima.
Ou com a ajuda das relações trigonométricas de 33,7º:
sen 33,7º = 4 / vR
vR = 4 / sen 33,7º = 7,21 km / h
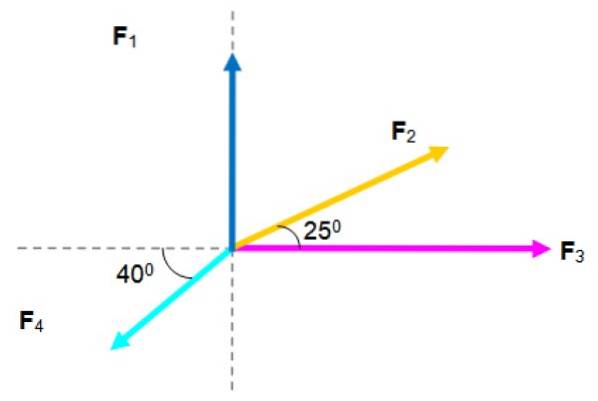
As seguintes forças atuam sobre uma partícula, cujas magnitudes estão listadas abaixo:
F1= 2,5 N; Fdois= 3 N; F3= 4 N; F4= 2,5 N
Encontre a força resultante.
Podemos adicionar graficamente começando com qualquer um dos vetores, uma vez que a soma do vetor é comutativa.
Na figura A, começamos com F1. Estabelecendo uma escala e com a ajuda de uma régua e um quadrado, os outros vetores são transferidos para colocá-los um após o outro..
O vetor FR é dirigido da origem de F1 até o fim de F4. Sua magnitude é 5,2 N e forma um ângulo de 26,5º em relação à horizontal.
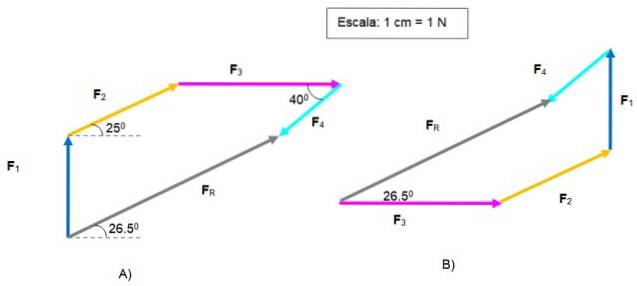
Na figura B o mesmo problema foi resolvido, começando com F3 e terminando com F4, para ficar igual FR .
Os polígonos são diferentes, mas o resultado é o mesmo. O leitor pode fazer o teste alterando a ordem dos vetores novamente.



Ainda sem comentários