
O teorema de Varignon, em Mecânica, afirma que a soma dos momentos produzidos por um sistema de forças concorrentes em relação a um determinado ponto é igual ao momento da força resultante em relação ao mesmo ponto..
Por esta razão, este teorema também é conhecido como o começo dos momentos.
Embora o primeiro a enunciá-lo tenha sido o holandês Simon Stevin (1548-1620), o criador do paradoxo hidrostático, o matemático francês Pierre Varignon (1654-1722) foi quem mais tarde lhe deu sua forma final.
Um exemplo de como o teorema de Varignon funciona em Mecânica é o seguinte: suponha que um sistema simples de duas forças coplanares e concorrentes atue em um ponto F1 Y Fdois, (indicado em negrito por causa de seu caractere vetorial). Essas forças dão origem a uma rede ou força resultante, chamada FR.
Cada força exerce um torque ou momento sobre um ponto O, que é calculado pelo produto vetorial entre o vetor posição rOP e a força F, Onde rOP é direcionado de O para o ponto de simultaneidade P:
MO1 = rOP × F1
MO2 = rOP × Fdois
Dado que FR = F1 + Fdois, então:
MOU = rOP × F1 + rOP × Fdois = MO1 + MO2
Mas como rOP é um fator comum, então, a aplicação de propriedade distributiva ao produto vetorial:
MOU = rOP × (F1 + Fdois) = rOP × FR
Portanto, a soma dos momentos ou torques de cada força em relação ao ponto O é equivalente ao momento da força resultante em relação ao mesmo ponto.
Let Ser um sistema de N forças concorrentes, formado por F1, Fdois, F3... FN, cujas linhas de ação se cruzam no ponto P (ver figura 1), o momento deste sistema de força MOU, em relação a um ponto O é dado por:
MOU = rOP × F1 + rOP × Fdois + rOP × F3 +... rOP × FN = rOP × (F1 + Fdois + F3 +... FN)
Para provar o teorema, é feito uso da propriedade distributiva do produto vetorial entre vetores.
Sejam as forças F1, Fdois, F3... FN aplicado aos pontos A1, PARAdois, PARA3… PARAN e concorrente no ponto P. O momento resultante deste sistema, com relação a um ponto O, denominado MOU, é a soma dos momentos de cada força, com relação ao referido ponto:
MOU = ∑ rOAi × Feu
Onde a soma vai de i = 1 a i = N, uma vez que existem N forças. Como estamos lidando com forças concorrentes e como o produto vetorial entre vetores paralelos é zero, acontece que:
rPAi × Feu = 0
Com o vetor nulo denotado como 0.
O momento de uma das forças em relação a O, por exemplo o da força Feu aplicado em Aeu, se escreve assim:
Mouvi = rOAi × Feu
O vetor de posição rOAi pode ser expresso como a soma de dois vetores de posição:
rOAi = rOP + rPAi
Desta forma, o momento sobre O da força Feu isso é:
Mouvi = (rOP + rPAi) × Feu = (rOP × Feu) + (rPAi × Feu)
Mas o último termo é nulo, conforme explicado acima, porque rPAi está na linha de ação de Feu, portanto:
Mouvi = rOP × Feu
Sabendo que o momento do sistema em relação ao ponto O é a soma de todos os momentos individuais de cada força em relação ao referido ponto, então:
MOU = ∑ Mouvi = ∑ rOP × Feu
o que rOP é constante resulta da soma:
MOU = rOP × (∑ Feu)
Mas ∑ Feu é simplesmente a força resultante ou força resultante FR, portanto, conclui-se imediatamente que:
MOU = rOP × FR
O teorema de Varignon facilita o cálculo do momento de força F Com relação ao ponto O na estrutura mostrada na figura, se a força é decomposta em seus componentes retangulares e o momento de cada um deles é calculado:
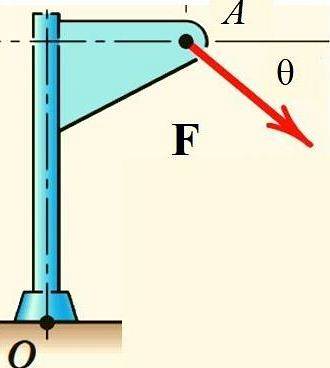
Quando a força resultante de um sistema é conhecida, o teorema de Varignon pode ser aplicado para substituir a soma de cada um dos momentos produzidos pelas forças que o compõem pelo momento da resultante.
Se o sistema consiste em forças no mesmo plano e o ponto em relação ao qual o momento deve ser calculado pertence a esse plano, o momento resultante é perpendicular.
Por exemplo, se todas as forças estão no plano xy, o momento é direcionado no eixo z e resta apenas encontrar sua magnitude e seu sentido, como é o caso do exemplo descrito acima.
Nesse caso, o teorema de Varignon nos permite calcular o momento resultante do sistema por meio da soma. É muito útil no caso de um sistema de força tridimensional, para o qual a direção do momento resultante não é conhecida a priori..
Para resolver esses exercícios, é conveniente decompor as forças e posicionar os vetores em suas componentes retangulares e, a partir da soma dos momentos, determinar as componentes do momento líquido..
Usando o teorema de Varignon, calcule o momento da força F em torno do ponto O mostrado na figura se a magnitude de F é 725 N.
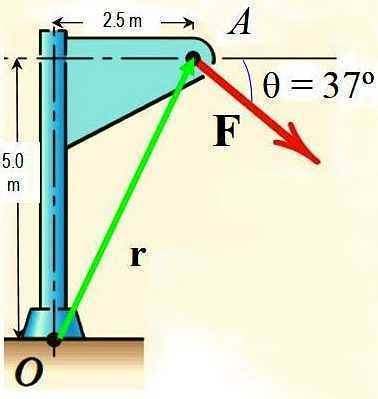
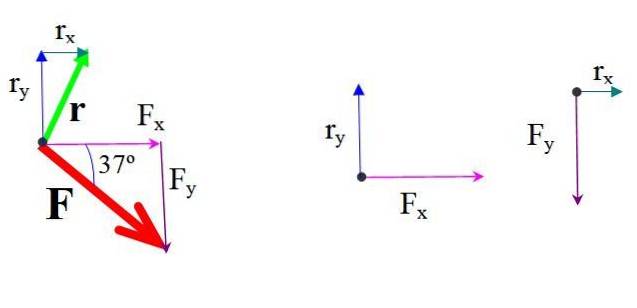
Para aplicar o teorema de Varignon, decomponha a força F em duas componentes, cujos respectivos momentos em torno de O são calculados e somados para obter o momento resultante.
Fx = 725 N ∙ cos 37 º = 579,0 N
FY = - 725 N N ∙ sin 37 º = −436,3 N
Da mesma forma, o vetor posição r direcionado de O para A tem os componentes:
rx = 2,5 m
rY = 5,0 m
O momento de cada componente da força em torno de O é encontrado multiplicando-se a força e a distância perpendicular.
Ambas as forças tendem a girar a estrutura na mesma direção, que neste caso é no sentido horário, à qual um sinal positivo é arbitrariamente atribuído:
MBoi = Fx∙ rY ∙ sen 90º = 579,0 N ∙ 5,0 m = 2895 N ∙ m
MOi = FY∙ rx ∙ sin (−90º) = −436,3 N ∙ 2,5 m ∙ (−1) = 1090,8 N ∙ m
O momento resultante sobre O é:
MOU = MBoi + MOi = 3985,8 N ∙ m perpendicular ao plano e no sentido horário.



Ainda sem comentários