O vetor normal é aquele que define a direção perpendicular a alguma entidade geométrica em consideração, que pode ser uma curva, um plano ou uma superfície, por exemplo.
É um conceito muito útil no posicionamento de uma partícula em movimento ou alguma superfície no espaço. No gráfico a seguir é possível ver como é o vetor normal para uma curva arbitrária C:
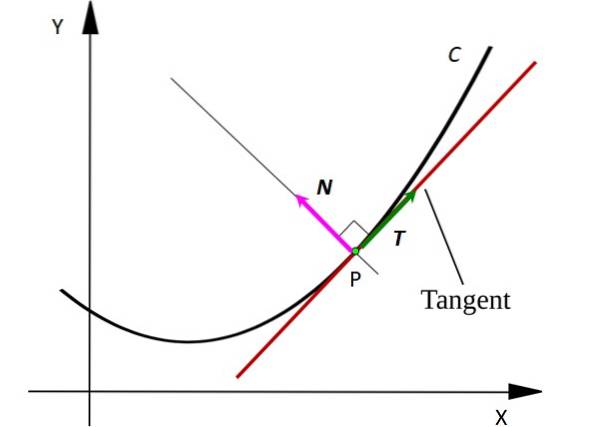
Considere um ponto P na curva C. O ponto pode representar uma partícula em movimento que se move ao longo de um caminho em forma de C. A linha tangente à curva no ponto P é desenhada em vermelho..
Observe que o vetor T é tangente a C em cada ponto, enquanto o vetor N é perpendicular a T y aponta para o centro de um círculo imaginário cujo arco é um segmento de C. Os vetores são indicados em negrito no texto impresso, para distingui-los de outras quantidades não vetoriais.
O vetor T indica sempre para onde a partícula está se movendo, portanto indica sua velocidade. Em vez do vetor N sempre aponta na direção em que a partícula está girando, desta forma indica a concavidade da curva C.
Índice do artigo
O vetor normal não é necessariamente um vetor unitário, ou seja, um vetor cujo módulo é 1, mas se for, é denominado vetor de unidade normal.
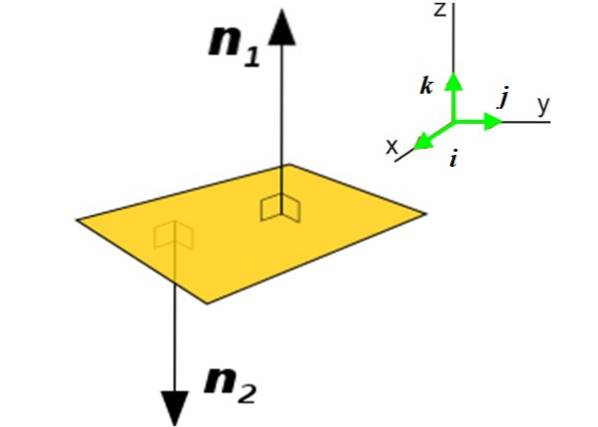
Em muitas aplicações, é necessário conhecer o vetor normal para um plano em vez de uma curva. Este vetor revela a orientação do referido plano no espaço. Por exemplo, considere o avião P (amarelo) da figura:
Existem dois vetores normais para este plano: n1 Y ndois. A utilização de um ou de outro dependerá do contexto em que se encontra o referido plano. Obter o vetor normal para um plano é muito simples se você conhece sua equação:
ax + by + cz + d = 0, com para, b, c Y d numeros reais.
Bem, um vetor normal para o referido plano é dado por:
N = a eu + b j + c k
Aqui o vetor N É expresso em termos de vetores unitários e perpendiculares entre si eu, j Y k, direcionado ao longo das três direções que determinam o espaço X e Z, veja a figura 2 à direita.
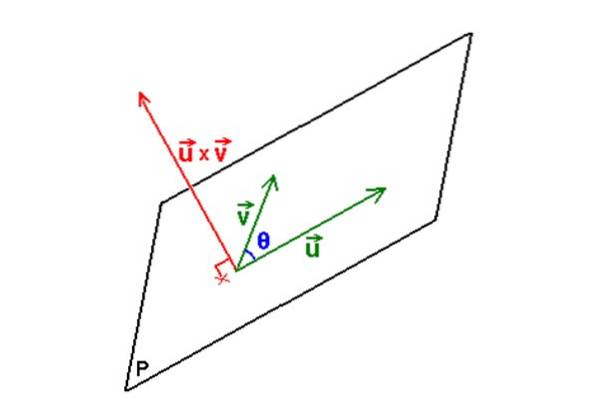
Um procedimento muito simples para encontrar o vetor normal faz uso das propriedades do produto vetorial entre dois vetores.
Como se sabe, três pontos diferentes e não colineares entre si, determinam um plano P. Agora, é possível obter dois vetores ou Y v que pertencem ao referido plano tendo estes três pontos.
Depois de ter os vetores, o produto vetorial ou x v é uma operação cujo resultado é por sua vez um vetor, que tem a propriedade de ser perpendicular ao plano determinado por ou Y v.
Conhecido este vetor, é denotado como N, e a partir dele será possível determinar a equação do plano graças à equação indicada na seção anterior:
N = ou x v
A figura a seguir ilustra o procedimento descrito:
Encontre a equação do plano determinada pelos pontos A (2,1,3); B (0,1,1); C (4,2,1).
Este exercício ilustra o procedimento descrito acima. Por possuir 3 pontos, um deles é escolhido como origem comum de dois vetores que pertencem ao plano definido por esses pontos. Por exemplo, o ponto A é definido como a origem e os vetores são construídos AB Y AC.
O vetor AB é o vetor cuja origem é o ponto A e cujo ponto final é o ponto B. As coordenadas do vetor AB são determinados subtraindo respectivamente as coordenadas de B das coordenadas de A:
AB = (0-2) eu + (1-1) j + (1-3) k = -2eu + 0j -dois k
Procedemos da mesma maneira para encontrar o vetor AC:
AC = (4-2) eu + (2-1) j + (1-3) k = 2eu + j -dois k
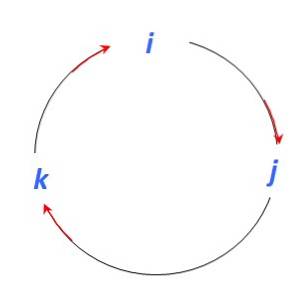
Existem vários procedimentos para encontrar o produto vetorial entre dois vetores. Este exemplo usa um procedimento mnemônico que faz uso da seguinte figura para encontrar os produtos vetoriais entre os vetores unitários eu, j Y k:
Para começar, é bom lembrar que os produtos vetoriais entre vetores paralelos são nulos, portanto:
eu x eu = 0; j x j = 0; k x k = 0
E como o produto vetorial é outro vetor perpendicular aos vetores participantes, ao se mover na direção da seta vermelha temos:
eu x j = k ; j x k = eu; k x eu = j
Se você tiver que se mover na direção oposta à da seta, adicione um sinal (-):
j x eu = - k; k x j = -eu; eu x k = -j
No total, é possível fazer 9 produtos vetoriais com os vetores unitários eu, j Y k, dos quais 3 serão nulos.
AB x AC = (-2eu + 0j -dois k) x (2eu + j -dois k) = -4 (eu x eu) -dois(eu x j) +4 (eu x k) +0 (j x eu) + 0 (j x j) - 0 (j x k) - 4 (k x eu)-dois (k x j) + 4 (k x k) = -2k-4j-4j+doiseu = 2eu -8j-doisk
O vetor N foi determinado pelo produto do vetor calculado anteriormente:
N = doiseu -8j-doisk
Portanto, a = 2, b = -8, c = -2, o plano procurado é:
ax + by + cz + d = 0 → 2x-8y-2z + d = 0
O valor de d. Isso é fácil se os valores de qualquer um dos pontos A, B ou C que estão disponíveis forem substituídos na equação do plano. Escolhendo C, por exemplo:
x = 4; y = 2; z = 1
Permanece:
2,4 - 8,2 - 2,1 + d = 0
-10 + d = 0
d = 10
Em suma, o mapa procurado é:
2x-8y-2z +10 = 0
O leitor curioso pode se perguntar se o mesmo resultado teria sido obtido se, em vez de fazer AB x AC eles teriam escolhido para efetuar AC x AB. A resposta é sim, o plano determinado por esses três pontos é único e possui dois vetores normais, conforme mostrado na figura 2.
Quanto ao ponto selecionado como origem dos vetores, não há problema em escolher qualquer um dos outros dois.



Ainda sem comentários