O vetor resultante é aquela obtida por meio de uma operação com vetores cujo resultado também é um vetor. Normalmente esta operação é a soma de dois ou mais vetores, por meio dos quais é obtido um vetor cujo efeito é equivalente.
Desta forma, vetores como a velocidade, aceleração ou força resultantes são obtidos. Por exemplo, quando várias forças atuam em um corpo F1, Fdois, F3,… a soma vetorial de todas essas forças é equivalente à força resultante (a resultante), que é matematicamente expressa da seguinte forma:
F1 + Fdois + F3 +… = FR ou FN

O vetor resultante, sejam forças ou qualquer outra magnitude vetorial, é encontrado aplicando-se as regras de adição de vetores. Como os vetores possuem direção e sentido além do valor numérico, não basta somar os módulos para ter o vetor resultante.
Isso é verdade apenas no caso em que os vetores envolvidos estão na mesma direção (ver exemplos). Caso contrário, é necessário utilizar métodos de soma vetorial, que, dependendo do caso, podem ser geométricos ou analíticos..
Índice do artigo
Os métodos geométricos para encontrar o vetor resultante são o método poligonal e o método do paralelogramo.
Quanto aos métodos analíticos, existe o método dos componentes, pelo qual se pode encontrar o vetor resultante de qualquer sistema de vetores, desde que tenhamos seus componentes cartesianos..
Suponha que os vetores ou Y v (Nós os denotamos em negrito para distingui-los dos escalares). Na figura 2a), nós os temos localizados no plano. Na figura 2 b) ele foi transferido para o vetor v de tal forma que sua origem coincide com o final de ou. O vetor resultante vai da origem do primeiro (ou) até o fim do último (v):
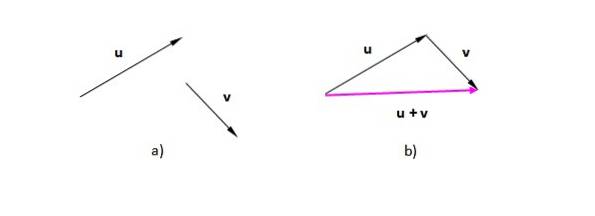
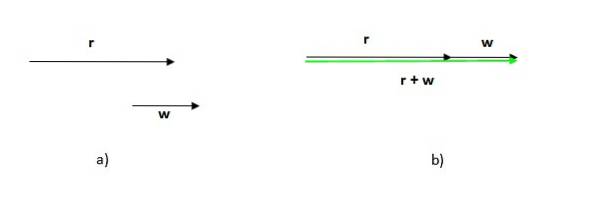
A figura resultante, neste caso, é um triângulo (um triângulo é um polígono de três lados). Se temos dois vetores na mesma direção, o procedimento é o mesmo: coloque um dos vetores após o outro e desenhe aquele que vai da origem ou cauda do primeiro até a ponta ou final do último.
Observe que a ordem em que este procedimento é feito não importa, uma vez que a soma dos vetores é comutativa.
Observe também que, neste caso, o módulo (o comprimento ou tamanho) do vetor resultante é a soma dos módulos dos vetores adicionados, ao contrário do caso anterior, em que o módulo do vetor resultante é menor que a soma dos módulos dos participantes.
Este método é muito apropriado quando você precisa adicionar dois vetores cujos pontos de origem coincidem, digamos, com a origem de um sistema de coordenadas x-y. Suponha que este seja o caso de nossos vetores ou Y v (figura 3a):
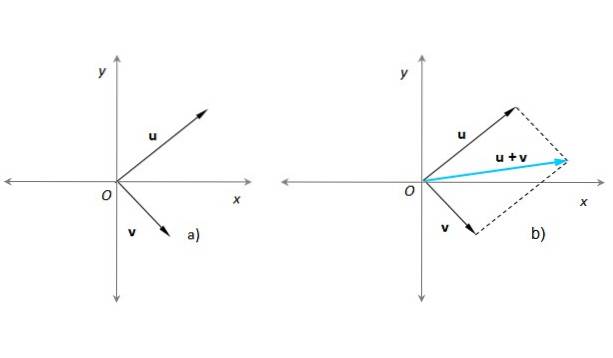
Na figura 3b) um paralelogramo foi construído com a ajuda de linhas pontilhadas paralelas a ou já v. O vetor resultante tem sua origem em O e sua extremidade no ponto onde as linhas pontilhadas se cruzam. Este procedimento é totalmente equivalente ao descrito na seção anterior..
Dados os seguintes vetores, encontre o vetor resultante usando o método transversal.
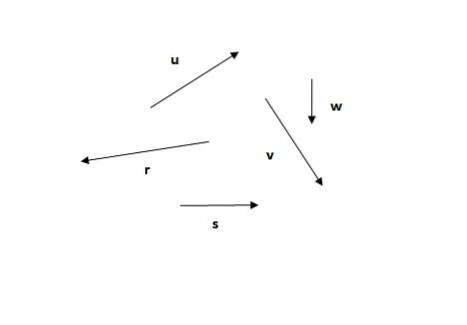
O método transversal é o primeiro dos métodos vistos. Lembre-se que a soma dos vetores é comutativa (a ordem dos adendos não altera a soma), então você pode começar com qualquer um dos vetores, por exemplo ou (figura 5a) ou r (figura 5b):
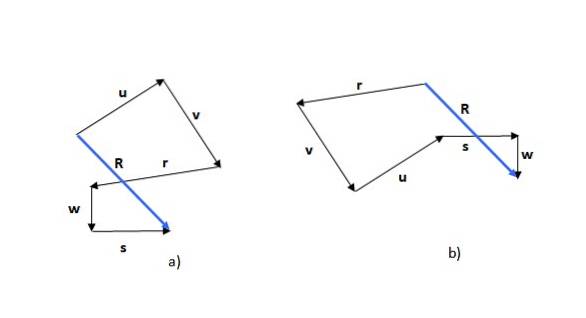
A figura obtida é um polígono e o vetor resultante (em azul) é denominado R. Se você começar com outro vetor, a forma que é formada pode ser diferente, como pode ser visto no exemplo, mas o vetor resultante é o mesmo.
Na figura a seguir sabe-se que os módulos dos vetores ou Y v respectivamente, são u = 3 unidades arbitrárias ev = 1,8 unidades arbitrárias. O ângulo que ou forma com o eixo x positivo é 45º, enquanto v ele forma 60º com o eixo y, como visto na figura. Encontre o vetor, a magnitude e a direção resultantes.
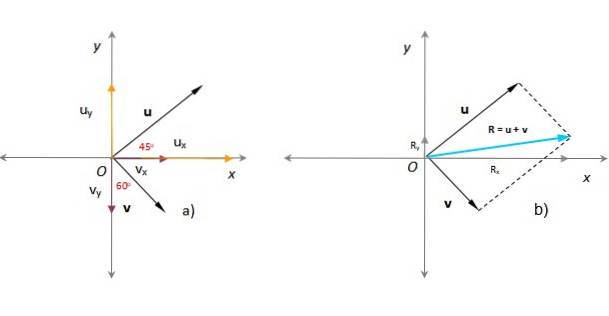
Na seção anterior, o vetor resultante foi encontrado aplicando o método do paralelogramo (em turquesa na figura).
Uma maneira fácil de encontrar o vetor resultante analiticamente é expressar os vetores adendos em termos de seus componentes cartesianos, o que é fácil quando o módulo e o ângulo são conhecidos, como os vetores neste exemplo:
oux = u. cos 45º = 3 x cos 45º = 2,12; ouY = u. sen 45º = 3x sen 45º = 2,12
vx = v. sen 60º = 1,8 x sen 60º = 1,56; vY = -v. cos 60º = -1,8 x cos 60º = - 0,9
Vetores ou Y v são vetores pertencentes ao plano, tendo, portanto, dois componentes cada um. O vetor u está no primeiro quadrante e seus componentes são positivos, enquanto o vetor v está no quarto quadrante; seu componente x é positivo, mas sua projeção no eixo vertical cai no eixo y negativo.
O vetor resultante é encontrado adicionando algebricamente os respectivos componentes xey, para obter seus componentes cartesianos:
Rx = 2,12 + 1,56 = 3,68
RY = 2,12 + (-0,9) = 1,22
Uma vez que os componentes cartesianos foram especificados, o vetor é totalmente conhecido. O vetor resultante pode ser expresso com a notação entre colchetes (suspensórios):
R = < 3.68; 1.22> unidades arbitrárias
A notação com colchetes é usada para distinguir um vetor de um ponto no plano (ou no espaço). Outra maneira de expressar o vetor resultante analiticamente é usando os vetores unitários eu e j no avião (eu, j Y k No espaço):
R = 3,68 eu + 1,22 j unidades arbitrárias
Uma vez que ambos os componentes do vetor resultante são positivos, o vetor R pertence ao primeiro quadrante, que já havia sido visto graficamente antes.
Conhecendo os componentes cartesianos, a magnitude de R é calculada através do teorema de Pitágoras, uma vez que o vetor resultante R, junto com seus componentes Rx e RY formar um triângulo retângulo:
Magnitude ou módulo: R = (3,68dois + 1,22dois)½ = 3,88
Direção q tomando o eixo x positivo como referência: q = arctan (RY / Rx) = arctg (1,22 / 3,68) = 18,3 º



Ainda sem comentários